物聯網實現全球億萬種物品之間的互連,將不同行業、不同地域、不同應用、不同領域的物理實體按其內在關系緊密地關聯在一起,對小到螺絲、鉛筆,大到飛機、輪船等巨量物體進行聯網與互動。物聯網能夠實現社會活動和人們生活方式的變革,被預言為繼互聯網之后新的全球信息化產業浪潮,受到各國政府、企業和學術界的廣泛重視。
從信息技術角度看,物聯網是指具有感知和智能處理能力的可標識的物體,基于標準的可互操作的通信協議,在寬帶移動通信、下一代網絡和云計算平臺等技術的支撐下,獲取和處理物體自身或周圍環境的狀態信息,對事件及其發展及時做出判斷,提供對物體進行管理和控制的決策依據,從而形成信息獲取、物體管理和控制的全球性信息系統。物體能夠在人類直接干預或無需人工干預條件下感知事件、觸發動作和生成服務,通過協同的感知和互動來影響甚至控制事件向有利的方向發展。物聯網充分體現了物理世界和信息空間的深度融合,使人類可以融入到一體化的智能生態環境中,實現人、機、物的協同統一。
作為嶄新的綜合性信息系統,物聯網并不是單純的網絡概念,它包括信息的感知、傳輸、處理決策、服務等多個方面,呈現出自身顯著的特點。首先是對客觀物理世界的全面感知,它不僅表現在對單一的現象或目標進行多方面的觀察獲得綜合的感知數據,也表現在對現實世界各種物體現象的普遍感知;其次是物聯網實體間的泛在互聯,表現在各種物體經由多種接入模式實現異構互聯,也突出表現在物聯網不僅包括互聯網、電信網等公共網絡,還包括電網和交通網等專用網絡,錯綜復雜,形成“網中網”的形態;第三是智慧的信息處理和決策,它體現在物聯網中從感知到傳輸到決策應用的信息流,并最終為控制提供支持,也廣泛體現出物聯網中大量的物體和物體之間的關聯和互動。物體互動經過從物理空間到信息空間,再到物理空間的過程,形成感知、傳輸、決策、控制的開放式的循環。
物聯網不同于感知信息收集的傳感器網絡,也不同于信息傳輸的互聯網。它包含億萬種多樣的物體,承載和處理巨海量的感知信息,容納各種模式的接入和通信模式,實現從感知、處理到控制的循環過程。其系統架構如何構成,采用什么樣的體系結構,現已成為物聯網研究的核心問題之一。
1 從云計算到海計算
1.1 云計算
云計算是互聯網發展帶來的一種新型計算和服務模式,它是通過分布式計算和虛擬化技術建設數據中心或超級計算機,以租賃或免費方式向技術開發者或企業客戶提供數據存儲、分析以及科學計算等服務。廣義上講,云計算是指廠商通過建立網絡服務集群,向多種客戶提供硬件租賃、數據存儲、計算分析和在線服務等不同類型的服務。云計算的主要服務形式有以亞馬遜公司為代表的基礎設施即服務,以Saleforce為代表的平臺即服務,以及以微軟代表的軟件即服務等。
云計算的“云”就是存在于互聯網的服務器集群上的服務器資源,包括硬件資源(如服務器、存儲器和處理器等)和軟件資源(如應用軟件、集成開發環境等)。本地終端只需要通過互聯網發送一條請求信息,“云端”就會有成千上萬的計算機為你提供需要的資源,并把結果反饋給發送請求的終端。每個提供云計算服務的公司,其服務器資源分布在相對集中的世界上少量幾個地方,對資源基本采用集中式的存放管理,而資源的分配調度采用分布式和虛擬化技術。云計算強調終端功能的弱化,通過功能強大的“云端”給需要各種服務的終端提供支持。如同用電用水一樣,我們可以隨時隨地獲取計算、存儲等信息服務。
1.2 物聯網
圖1所示是歐盟發展框架7的CASAGRAS[1]工作組給出的物聯網體系架構,包括感知層、傳輸層、處理層和應用層4個層次。在感知層中,嵌入有感知器件和射頻標簽(RFID)的物體形成局部網絡,協同感知周圍環境或自身狀態,并對獲取的感知信息進行初步處理和判決,以及根據相應規則積極進行響應,同時,通過各種接入網絡把中間或最終處理結果接入到傳輸層;傳輸層包括寬帶無線網絡、光纖網絡、蜂窩網絡和各種專用網絡,在傳輸大量感知信息的同時,對傳輸的信息進行融合等處理;在處理層提供存儲和處理功能,表現為各種各樣的數據中心以中間件的形式采用數據挖掘、模式識別和人工智能等技術,提供數據分析、局勢判斷和控制決策等處理功能。云計算的“云端”就在處理層,主要通過數據中心來提供服務;最上層的應用層建立不同領域中的各種應用。
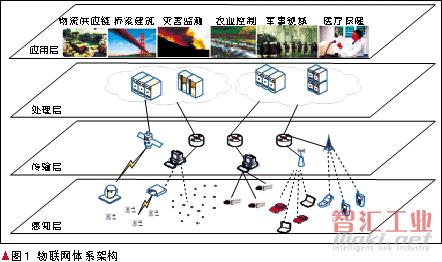
互聯網也可以看成存在類似的架構,底層是數據傳輸的網絡支撐層,中間是數據中心的處理層和上層是各種互聯網應用。從層次架構來看,物聯網不同于互聯網的原因在于它的感知層。感知層獲取數據的特性決定了物聯網的上層相應要發生一些變化。
1.3 海計算
物聯網具有顯著的異構性、混雜性和超大規模等特點。異構性表現在不同制造商、不同擁有者、不同類型、不同級別、不同范疇的對象網絡共存于物聯網中,網絡之間在通信協議、信息屬性、應用特征等多個方面存在差異性,并形成混雜的異構網絡或“網中網”形態;混雜性表現在網絡形態和組成的異構混雜性,多信息源的并發混雜性,場景、服務和應用的混雜性等多個方面;物聯網是物理世界與信息空間的深度融合系統,是涉及全球的人、機、物的綜合信息系統,其規模之大無所不包。
物聯網的上述特點決定了感知層數據的特性,即異構的、混雜的、大規模的實時流感知數據。同時,感知數據還具有一個顯著特點就是時空特性,就是感知數據在特定時間和特定空間內才有意義,如果不在這個地點或過了這個時間,數據的意義可能就不大了。如中關村大街的交通相關信息,這些交通信息通過很多節點實時采集,是大數據量的隨時間不斷采樣的實時流信息。這些信息誰需要?是在這個區域的人車才真正需要了解當時的詳細擁塞或停車信息等,以便及時掌握交通動態,調整行車路線或停止地方。其他地方的人們可能不關心這個區域的交通信息,或僅僅只需要了解大概情況,實時性要求也不是很高,如了解中關村大街的歷史交通信息等。另外,物聯網的物體之間需要協同交互,對事件及時做出反應,這就需要實時性采集、處理和控制,如在中關村大街上前后行駛的兩輛車需要實時交互,既要保持暢通行駛,又要通過保持一定的車距來保證安全性,這就需要在當前場景下局部空間內車輛之間實時通信和決策處理。
為此,我們針對物聯網這些數據的特性提出了啞鈴式的存儲和計算模式。大量的感知信息在采集和使用的本地進行存儲,經過處理后的中間或最后結果存儲在互聯網上(后端),放到云中的數據中心。感知信息的預處理、判斷和決策等信息處理主要在當前場景下的前端完成,必要的需要大運算量的計算才通過“云端”的數據中心來處理。只有這樣,才能節省通信帶寬,否則網絡很難傳輸這么多的感知數據;才能節省存儲空間,數據中心再大也難存下實時流的原始感知數據,也沒有必要存儲原始感知數據;才能滿足實時性的交互處理,如果通過互聯網或云計算來做出處理和決定,就不能滿足很多實時性的應用;更重要的是能夠滿足物聯網的大規模的擴展性。物聯網一定是分布式的系統,局部空間內的高度動態自治管理才有利于擴展性。
中科院現在提出“海計算”[2]這個新的計算模式,實質是把智能推向前端。智能化的前端具有存儲、計算和通信能力,能在局部場景空間內前端之間協同感知和判斷決策,對感知事件及時做出響應,具有高度的動態自治性。海計算的每個“海水滴”就是全球的每個物體,它們具有智能,能夠協助感知互動。億萬種物體組成物聯網系統,就如同海水滴形成大海一樣。
1.4 云海結合
物聯網涉及到全球的物體(包括人)規模,以及其應用需求和感知層數據的特性,決定了物聯網的架構需要“云”和“海”相結合。一方面,在局部應用場景中,感知數據存儲在局部現場,智能前端在協同感知的基礎上,通過實時交互共同完成事件判斷、決策等處理,及時對事件做出反應。另一方面,云計算的“云”的后端提供面向全球的存儲和處理服務。物聯網的各種前端把處理的中間或最后結果存儲到云的后端。前端在本地處理過程中,在必要時需要后端的存儲信息和處理能力的支持,及時發送服務請求獲得云的后端支持。這具有良好的擴展性,既滿足前端實時交互,又滿足全球物體的互聯互動。
2 物聯網體系結構
除了獲取、承載和處理超海量的感知信息這個顯著特征外,物聯網的另一個顯著特征就是具有決策和控制功能,能夠影響物體周圍的環境或控制事件的進程;就是通過對物理世界的感知,對感知信息的傳輸和處理,到對事件的判斷和決策,再回到控制執行器進行執行動作,從而對事件產生作用來影響事件的進程,形成從物理世界到信息空間再到物理世界的循環過程。
2.1 開放式循環結構
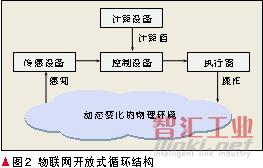
物聯網形成人機物的協調環境系統,包含從感知、傳輸、處理和控制的循環過程。物聯網由億萬種物體、設備和人參與形成或與物理環境共存,這些對象之間存在極其復雜的關系(或稱為關系鏈)。一個事件往往受到多種因素影響,這些因素本身也是動態變化的。如移動車輛在移動過程中所處局部環境具有高度動態性,因為車況、路況、周圍車輛、無線接入網絡等一直在變化。多種因素均會影響車輛間產生碰撞,造成交通事件,通過智能的感知、通信和控制人們可以避免車輛碰撞。這使得物聯網的信息循環不同于傳統的閉環控制,而是開放式的循環過程[3]。物聯網開放式循環結構如圖2所示。傳感設備的感知信息包括物理環境的信息和物理環境對系統的反饋信息,執行器改變物理實體狀態和實現系統對物理環境的反饋。系統會預先設定控制語義。計算設備對物理信息進行計算和判斷,當判斷值在控制語義下滿足一定的觸發條件時,控制設備會發送命令給執行器。
由于物理環境、感知目標存在混雜性,信息設備存在一定的誤差,以及其狀態、行為存在不確定性等,對于循環結構而言,會帶來獲取的感知信息的不準確性,以及物體控制的不可靠性。因此,如何全面準確地獲取感知信息,以及如何保證控制過程和結果符合設計要求,是開放式循環結構的兩個重要方面。
2.2 智能前端
隨著微電子、計算和通信等技術的發展,在物體中嵌入微型的感知、處理和通信等功能部件成為可能。越來越多的物體成為物聯網的智能前端,帶動物聯網逐步應用和發展。智能前端兼有感知信息的獲取、決策操作的執行,以及諸多的處理和交互功能,是局部自治環境中的終端實體,也是物聯網的基本單元。
下面結合物聯網的典型應用之一智能交通來說明前端的智能化。車輛安全系統能在人工干預或無需人工干預情況下,保證高速車輛的安全行駛,是智能交通的核心內容。圖3所示是車輛安全協作系統架構[4]示意圖。車輛通過傳感器、全球定位系統(GPS)等設備收集車輛自身與周圍環境的信息。計算模塊中的消息產生機制產生車輛狀態信息,并通過無線車載網絡將狀態消息廣播給周圍車輛。車輛通過專用短距離信道(DSRC)接收鄰居車輛的狀態信息,根據自身和多個鄰居車輛的狀態信息,預測車輛之間及車輛與周圍環境之間的位置關系,以及可能發生的碰撞,及時調整車輛操作參數來提高車輛行駛的效率和保障安全。
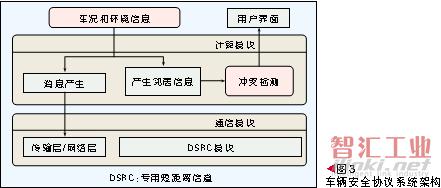
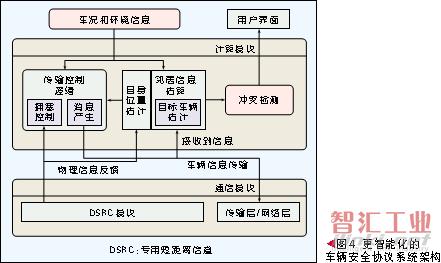
圖3所示的架構僅僅把車輛狀態信息及時廣播出去,在車輛多的情況下,有可能產生信息傳輸延遲較大,甚至信息丟失。Fallah[5]等人考慮無線網絡的通信狀態,給車輛賦予更智能的功能,如圖4所示。與傳統的車輛安全協作系統架構不同之處在于,傳輸控制單元根據無線車載網絡的信道情況和狀態信息,調整發送的頻率和消息長度,根據自身位置估計模型和實際位置決定是否發送自身位置信息,從而提高了系統的魯棒性和擴展性。
2.3 融合系統體系結構
體系結構是對系統的抽象描述。物聯網系統既涉及規模龐大的智能電網,又包含智能醫療的醫療設備。目前世界各國都在結合具體行業推廣物聯網的應用,離形成全球的物聯網系統還需要非常長的時間。提出面向全球物聯網、適應各種行業應用的體系結構,與下一代互聯網體系結構相比,具有更巨大的困難和挑戰。現在研究人員通常只是從具體行業或小的系統去探索物聯網的體系結構。
物聯網與物理信息融合系統(CPS)[6-9]密切相關,這兩個概念目前越來越趨向一致。Tan.Y[10]等人提出了一種CPS體系結構的原型,如圖5所示。圖5表示了物理世界、信息空間和人的感知的互動關系,給出了感知事件流、控制信息流的流程。

CPS體系結構原型的幾個組件描述如下:
(1)物理世界
物理世界包括物理實體(諸如醫療器械、車輛、飛機、發電站)和實體所處的物理環境。
(2)傳感器
傳感器作為測量物理環境的手段,直接和物理環境或現象相關。傳感器將相關的信息傳輸到信息世界。
(3)執行器
執行器根據來自信息世界的命令,改變物理實體設備狀態。
(4)控制單元
基于事件驅動的控制單元接受來自傳感單元的事件和信息世界的信息,根據控制規則進行處理。
(5)通信機制
事件/信息是通信機制的抽象元素。事件既可以是傳感器表示的“原始數據”,也可以是執行器表示的“操作”。通過控制單元對事件的處理,信息可以抽象地表述物理世界。
(6)數據服務器
數據服務器為事件的產生提供分布式的記錄方式,事件可以通過傳輸網絡自動轉換為數據服務器的記錄,以便于以后檢索。
(7)傳輸網絡
傳輸網絡包括傳感設備、控制設備、執行設備、服務器,以及他們之間的無線或有線通信設備。
3 結束語
雖然人們提出物聯網這個詞已有一段時間,但物聯網的概念一直在不斷的發展和演變。從最早的傳感器網絡和基于RFID的物體不斷被跟蹤記錄,現已發展到物體的智能化,能夠協同感知和交互,以及全球物體之間的深度互聯和互動。目前,人們從不同行業探討物聯網的應用,進行“豎井式”的研發和推廣應用。但是,到跨行業、跨領域,直到全球物體之間的互聯互動,還有相當長的艱苦道路要走,現在只是勾畫出人類信息發展的一個美好前景。
就像互聯網改變人們的交流方式和商業模式一樣,物聯網也會改變人、信息空間和和物理世界的交互方式。它將人們所在物理世界和虛擬世界橋連起來,實現人與人、人與物、物與物的緊密耦合,形成一個智能、綠色、和諧的世界。物聯網需要我們長期研究和探索其中的理論和技術問題。
4 參考文獻
[1] Coordination and Support Action for Global RFID-Related Activities and Standardization [EB/OL]。 [2008-01-01]。 http://www.eeca-ict.eu/successstories/s13.pdf.
[2] 孫凝暉, 徐志偉, 李國杰。 海計算:物聯網的新型計算模型 [J]。 中國計算機學會通訊, 2010(2):39-43.
[3] ASTROM K J, MURRAY R M. Feedback Systems: An Introduction for Scientists and Engineers [M]。 Princeton, NJ, USA: Princeton University Press, 2008.
[4] XU Q. Vehicle-to-Vehicle Safety Messaging in DSRC [C]//Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks (VANET‘04), Oct 1,2004, Philadelphia, PA, USA. New York, NY, USA: ACM, 2004:19-28.
[5] FALLAH Y P. HUANG C L, SENGUPTA R, et al. Design of Cooperative Vehicle Safety Systems based on Tight Coupling of Communication, Computing and Physical Vehicle Dynamics [C]//Proceedings of the 1st ACM/IEEE International Conference on Cyber-physical Systems(ICCPS’10), May 25-28,2010, Stockholm, Sweden. New York, NY, USA:ACM, 2010:159-167.
[6] GROUP C S. Cyber-Physical Systems: Executive Summary [R/OL]。 [2008-03-06] http://varma.ece.cmu.edu/Summit.
[7] LEE E A. Cyber Physical Systems: Design Challenges [C]//Proceedings of the 11th IEEE International Symposium on Object/Component/Service-Oriented Real-time Distributed Computing (ISORC‘08), May 5-7,2008, Orlando, FL, USA 。 Piscataway, NJ, USA: IEEE, 2008:363-369.
[8] LEE E A. Cyber-Physical Systems: Are Computing Foundations Adequate [R/OL]。 [2006-10-16-17]。 http://citeseerx.ist.psu.edu/viewdoc/downloa.
[9] STANKOVIC J A. Opportunities and Obligations for Physical Computing Systems [J]。 Computer, 2005,38(11):23-31.
[10] YING T, VURAN M C, GODDARD S. Spatio-Temporal Event Model for Cyber-Physical Systems [C]//Proceedings of the 29th International Conference on Distributed Computing Systems (ICDCS’09), Jun 22-26,2009, Montreal, Canada. Piscataway, NJ,USA: IEEE, 2009:44-50.
(審核編輯: 智匯小新)
分享



